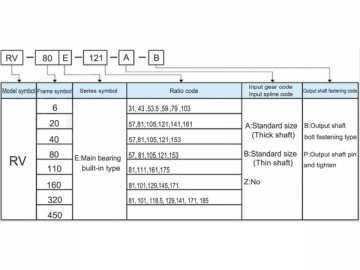
RV-E Industrial Robot Joint Speed Reducer



This industrial robot joint speed reducer is widely applied to robot palletizer, gantry loader, locators, selective compliance assembly robot, cylindrical coordinate robot, positioning turntable, rotating shaft, cover switch, AGV drive, medical instruments, vertical multi-joint robot.
| Output Speed(rpm) | 5 | 10 | 15 | 20 | 25 | 30 | 40 | 50 | 60 | |||
| Model | Ratio code | Ratio | Output Torque(Nm) / Input Capacity(kW) | |||||||||
| Shaft rotate | Shell rotate | |||||||||||
| RV-6E | 31 | 31 | 30 | 101 / 0.07 | 81 / 0.11 | 72 / 0.15 | 66 / 0.19 | 62 / 0.22 | 58 / 0.25 | 54 / 0.30 | 50 / 0.35 | 47 / 0.40 |
| 43 | 43 | 42 | ||||||||||
| 53.5 | 53.5 | 52.5 | ||||||||||
| 59 | 59 | 58 | ||||||||||
| 79 | 79 | 78 | ||||||||||
| 103 | 103 | 102 | ||||||||||
| RV-20E | 57 | 57 | 56 | 231 / 0.16 | 188 / 0.26 | 167 / 0.35 | 153 / 0.43 | 143 / 0.50 | 135 / 0.57 | 124 / 0.70 | 115 / 0.81 | 110 / 0.92 |
| 81 | 81 | 80 | ||||||||||
| 105 | 105 | 104 | ||||||||||
| 121 | 121 | 120 | ||||||||||
| 141 | 141 | 140 | ||||||||||
| 161 | 161 | 160 | ||||||||||
| RV-40E | 57 | 57 | 56 | 572 / 0.40 | 465 / 0.65 | 412 / 0.86 | 377 / 1.05 | 353 / 1.23 | 334 / 1.40 | 307 / 1.71 | 287 / 2.00 | 271 / 2.27 |
| 81 | 81 | 80 | ||||||||||
| 105 | 105 | 104 | ||||||||||
| 121 | 121 | 120 | ||||||||||
| 153 | 153 | 152 | ||||||||||
| RV-80E | 57 | 57 | 56 | 1,088 / 0.76 | 885 / 1.24 | 784 / 1.64 | 719 / 2.01 | 672 / 2.35 | 637 / 2.67 | 584 / 3.26 | 546 / 3.81 | 517 / 4.33 |
| 81 | 81 | 80 | ||||||||||
| 101 | 101 | 100 | ||||||||||
| 121 | 121 | 120 | ||||||||||
| 153 | (153) | (152) | ||||||||||
| RV-110E | 81 | 81 | 80 | 1,499 / 1.05 | 1,215 / 1.70 | 1,078 / 2.26 | 990 / 2.76 | 925 / 3.23 | 875 / 3.67 | 804 / 4.49 | ||
| 111 | 111 | 110 | ||||||||||
| 161 | 161 | 160 | ||||||||||
| 175 | 1227/7 | 1220/7 | ||||||||||
| RV-160E | 81 | 81 | 80 | 2,176 / 1.52 | 1,774 / 2.48 | 1,568 / 3.28 | 1,441 / 4.02 | 1,343 / 4.69 | 1,274 / 5.34 | |||
| 101 | 101 | 100 | ||||||||||
| 129 | 129 | 128 | ||||||||||
| 145 | 145 | 144 | ||||||||||
| 171 | 171 | 170 | ||||||||||
| RV-320E | 81 | 81 | 80 | 4,361 / 3.04 | 3,538 / 4.94 | 3,136 / 6.57 | 2,881 / 8.05 | 2,695 / 9.41 | 5,548 / 10.7 | |||
| 101 | 101 | 100 | ||||||||||
| 118.5 | 118.5 | 117.5 | ||||||||||
| 129 | 129 | 128 | ||||||||||
| 141 | 141 | 140 | ||||||||||
| 171 | 171 | 170 | ||||||||||
| 185 | 185 | 184 | ||||||||||
| RV-450E | 81 | 81 | 80 | 6,135 / 4.28 | 4,978 / 6.95 | 4,410 / 9.24 | 4,047 / 11.3 | 3,783 / 13.2 | ||||
| 101 | 101 | 100 | ||||||||||
| 118.5 | 118.5 | 117.5 | ||||||||||
| 129 | 129 | 128 | ||||||||||
| 154.8 | 2013/13 | 2000/13 | ||||||||||
| 171 | 171 | 170 | ||||||||||
| 192 | 1347/7 | 1340/7 | ||||||||||
1. Structure of built-in main bearing
(1)High reliability
(2)Low total cost
(3)High torque rigidity and permissible torque and having the ability of bearing external load by installing angular contact ball bearing.
(4)Reduce the number of parts
(5)Easy installation
2. Structure of 2-stage reduction machanism
(1)Low vibration
(2)Low GD2
(3)Low vibration and slow revolution speed of RV wheel gear
(4)Low inertia
3. Structure of double column support
(1)High torsional rigidity
(2)Low vibration
(3)High impact resistance(500% of rated torque)
(4)The crank shaft is supported by double column in reducer.
4. Structure of rolling contact
(1)Good start efficiency
(2)Low abrasion and long working life
(3)Small tooth space(1 arc,min)
(4)Using rolling bearing
5. Structure of pin gear
(1)Small tooth space(1arc.min)
(2)High impact resistance(500% of rated torque)
(3)Large number of meshing of RV gear and pin gear at the same time














")
")













